Installation
Install the Python SDK for Reachy 2
How to Install the Python SDK
The Python SDK is a pure Python library. The installation should thus be rather straightforward. It supports Python >= 3.10 (older versions will not work because of typing syntax).
For now, the library pollen_vision used to do “perception”, needs Python 3.10, so you may want to have that version.
It works on Windows/Mac/Linux.
On Linux
We recommend using virtual environments for your development. They make the installation simple and avoid compatibility issues. They also come with their pip command.
Inside your virtual environment, you can install the library either from PyPI or by cloning the repository:
From PyPI
pip install reachy2-sdk
From the Source
git clone https://github.com/pollen-robotics/reachy2-sdk.git
cd reachy2-sdk
pip install -e reachy2-sdk
On Windows
We recommend using a virtual environment, which allows you to install all the needed packages to control Reachy without conflicts with existing packages on your computer.
Create the Virtual Environment:
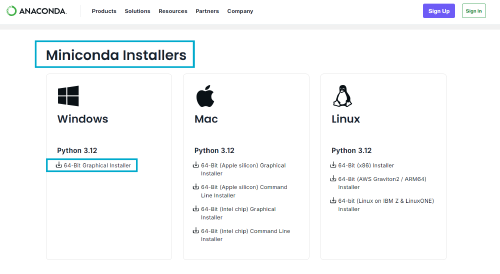
Use Miniconda, a minimal version of the Anaconda Python distribution. Download it here: scroll down to the Miniconda Installers section and click on the Windows installer.
Launch the
.exeyou just downloaded and follow the installation procedure.
Open the Anaconda Powershell Prompt from your applications and type:
conda create -n <env_name> python=3.10 gitFor example:
conda create -n reachy python=3.10 git
Activate your virtual environment:
conda activate <env_name>
Install the SDK Client:
Inside your virtual environment, you can install the library either from PyPI or by cloning the repository:
From PyPI
pip install reachy2-sdk
From Source
- Create a folder (e.g., “Dev”):
mkdir Dev - Navigate into this folder:
cd \Dev\ - Clone the SDK repository:
git clone https://github.com/pollen-robotics/reachy2-sdk.git - Navigate into the subfolder:
cd \reachy2-sdk\ - Install the library:
This command installs all the needed packages and libraries for the SDK to work in your virtual environment.pip install -e .
On Mac
To be done.
To ensure it worked, you can run:
pip list
and check that reachy2-sdk is listed.
Dependencies
The SDK relies on a few third-party Python packages, such as:
- numpy - mostly for trajectory computation
- opencv - for camera frame access
- grpc - to connect to the robot
These will be installed automatically when you install the SDK.
✅ Now that you have reachy2-sdk installed on your computer,
you’re all set to connect to your robot and start exploring with the Getting Started Notebooks.
So keep up—Reachy is waiting! 🚀📓