Teleoperation issues
Frequently asked questions on VR teleoperation application
Problems with the app
The app is lagging a lot, what can I do ?
Check that your computer is plugged (note that for some laptops, they must be plugged in as soon as they are switched on).
If that doesn’t resolve the lag, maybe your network is overloaded, you can try change your robot’s and your computer’s network (you don’t need to have internet for it to work, it can work on a isolated router). Check that there is no driver update available on your VR device (for Oculus Quest, you can see them on top of your MetaQuestLink app on your computer, if your device is plugged).
Finally, it can be a GPU issue : FAQ GPU.
When I hit “play”, I have a loading page in my device and I never enter the app
From source installation only
Go to Edition > Project Settings > XR Plug-in Management. Check that Initialize XR on Start-Up and Oculus are selected. If so, try to unselect the first one and try again.
Tunnelling appears only in one eye
From source installation only
Go to Edition > Project Settings > XR Plug-in Management > Oculus > Stereo rendering mode : select multi pass and try again.
Problem with the cameras or sound
The stereovision cameras seem to be misaligned
You need to recalibrate the cameras.
Stereovision calibration
0. Repositories installation
The calibration process relies on 2 Pollen Robotics repositories.
The simpliest way is to clone both of these repositories on your computer:
- Pollen’s
multicalfork. Clone the repo, then:
cd multical
pip install -e .
pollen-visionrepo. Clone the repo, then:
cd pollen-vision
pip install -e .[depthai_wrapper]
We recommand to use virtual environments.
1. Charuco calibration board
Go to pollen-vision/pollen_vision/pollen_vision/camera_wrappers/depthai/calibration.
If you don’t have one, generate a charuco board with the following command:
$ python3 generate_board.py
Print it on a A4 paper and place it on a flat surface (we use a wooden board).
You should have received a calibration board with the robot, with the relevant information written behind.
Mesure as accurately as possible the size of the squares and the size of the markers and edit the example_boards/pollen_charuco.yaml file in the previously cloned multical repo to report the values you measured (must be in meters).
2. Get some images
Connect the teleop cameras to your computer. You simply have to disconnect the teleop cameras USB connector from the robot’s computer and plug it to your computer instead.
If it is your first calibration, you must add the udev rules with:
echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="03e7", MODE="0666"' | sudo tee /etc/udev/rules.d/80-movidius.rules
sudo udevadm control --reload-rules && sudo udevadm trigger
Then, still in pollen-vision/pollen_vision/pollen_vision/camera_wrappers/depthai/calibration, run:
$ python3 acquire.py --config CONFIG_IMX296
Press return to save a pair of images in ./calib_images/ (by default, use --imagesPath to change this).
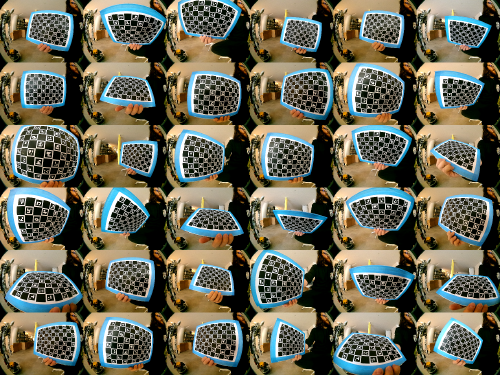
Try to cover a maximum of the field of view, with the board in a variety of orientations. If the coverage is good, about 30 images is sufficient. Also, make sure that most of the board is visible by all the cameras for all the saved images pairs.
Below is an example of good coverage:
3. Run multical
$ cd <...>/multical
$ multical calibrate --image_path <absolute_path_to_calib_images_dir> --boards example_boards/pollen_charuco.yaml --isFisheye True
(For some reason, –image_path must be an absolute path, relative paths don’t work)
It will write a calibration.json file in <path_to_calib_images_dir>.
4. Flash the calibration to the EEPROM
Back in pollen-vision/pollen_vision/pollen_vision/camera_wrappers/depthai/calibration.
Run:
$ python3 flash.py --config CONFIG_IMX296 --calib_json_file <path to calibration.json>
A backup file with the current calibration settings stored on the device will be produced in case you need to revert back.
If needed, run:
$ python3 restore_calibration_backup.py --calib_file CALIBRATION_BACKUP_<...>.json
5. Check the calibration
Run:
$ python3 check_epilines.py --config CONFIG_IMX296
And show the aruco board to the cameras.
An AVG SLOPE SCORE below 0.1% is OK.
Ideally it could be under 0.05%.
The lower, the better.
I have sound issues in teleoperation
Sound issues
Check in your laptop settings that your device is selected as “Output” and “Input”. Check also that you don’t have an audio device connected by Bluetooth that can interfere.
During teleoperation, the cameras and sound are managed by the webrtc service.
This service is automatically launched when you start Reachy 2 computer.